Part 2: Hardware · The robot's body
Chapter 6
计算平台 - 机器人的“电脑”
上一章说到,代码指令和执行器的实际运动之间永远存在差距。但在执行器动作之前,还有一个更基本的问题:这些代码跑在哪儿?
想象你在玩一个实时对战游戏。你的操作延迟如果是 20 毫秒,完全没感觉;如果是 200 毫秒,开始觉得“黏”;如果是 2 秒 - 你的角色已经被打死了。
机器人面临的是同一个问题,但后果更严重。一台移动机器人以 1 m/s 的速度行走,如果感知到前方有障碍物后需要 500 毫秒才能做出决策,它已经又走了 50 厘米。50 厘米足以让它撞上墙壁、撞倒货架、甚至撞到人。在机器人的世界里,延迟不是体验问题,是安全问题。
这就是为什么机器人不能简单地把数据发到云端、等云端算完再发回来 - 它需要一台自己随身携带的“电脑”,在本地完成最关键的计算。这台电脑就是机器人的计算平台。
为什么不能用你的 MacBook
这个问题新手经常问。MacBook Pro 的 M4 芯片性能很强,跑 PyTorch 推理也不慢,为什么不能直接塞进机器人里?
三个硬约束:
功耗。 你的 MacBook Pro 在跑大模型推理时功耗大约 30-40 瓦,加上屏幕、SSD、散热风扇,整机功耗轻松到 60-80 瓦。这对一台插着电源线的笔记本来说不算什么,但机器人靠电池活着。一台典型的移动机器人电池容量在 500-1000 Wh 左右,如果计算平台一个人就吃掉 60 瓦,那它占了整个电力预算的很大一块 - 还没算电机、传感器和通信模块的用电。Jetson Orin Nano 跑满 AI 推理的功耗大约 7-25 瓦,这是一个数量级的差距。
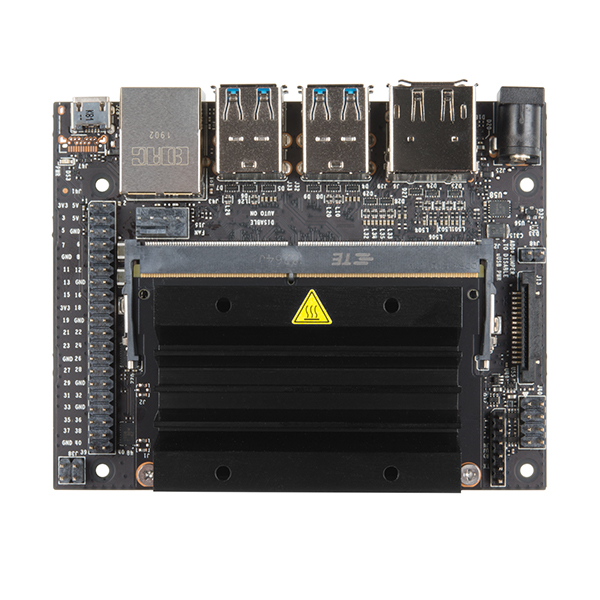
尺寸和散热。 MacBook Pro 的主板有一个精密的散热系统,加上铝制机身作为散热面积。把它拆出来塞进一台人形机器人的躯干里?没有位置。机器人内部的空间被电池、电机驱动板、传感器接口板、线缆占得满满当当。计算平台通常只能分到一个手掌大小的位置,而且散热条件远比笔记本恶劣 - 旁边可能就是发热的电机驱动器。Jetson 模块的尺寸大概是一张信用卡大小(Orin Nano 是 69.6 mm x 45 mm),专门为嵌入式场景设计。
接口和实时性。 MacBook 的接口是给人用的 - USB-C、HDMI、WiFi。机器人的计算平台需要直接对接传感器和执行器:多路 MIPI CSI 相机接口、CAN 总线(和电机驱动器通信的工业协议)、GPIO(通用输入输出引脚,用来触发和读取简单信号)、多路以太网。更关键的是,机器人需要确定性的实时响应 - 不是“平均 10 毫秒处理完”,而是“保证每次都在 10 毫秒内处理完”。macOS 不是实时操作系统,它可能在任何时候因为后台任务暂停你的程序几十毫秒。Jetson 跑的是 Linux,配合 PREEMPT_RT 内核补丁可以提供更好的实时性保证。
所以选择不是”Jetson 比 MacBook 更强” - 恰恰相反,论绝对算力 MacBook 可能更强。选择是“Jetson 是为机器人这个约束环境专门设计的”。就像你不会开一辆跑车去工地搬砖,不是跑车不好,是场景不对。
NVIDIA Jetson 系列全解析
第 3 章的玩家地图里已经列过 Jetson 的基本参数。这里往深挖一层 - 不只是“有几个型号”,而是“什么场景用哪个,为什么”。
产品线一览
| 型号 | AI 算力(INT8) | 功耗范围 | GPU 架构 | 内存 | 典型定位 |
|---|---|---|---|---|---|
| Orin Nano | 40-67 TOPS | 7-25W | Ampere | 4-8 GB | 入门/单任务 |
| Orin NX | 70-100 TOPS | 10-40W | Ampere | 8-16 GB | 开发主力 |
| AGX Orin | 200-275 TOPS | 15-60W | Ampere | 32-64 GB | 旗舰/复杂场景 |
| AGX Thor | ~2000 TOPS(FP4) | 40-130W | Blackwell | 128 GB | 下一代/人形机器人 |
几个关键点:
Orin Nano 是“够用就好”的选择。40-67 TOPS 足够跑一个 YOLO 检测模型做实时目标识别,或者一个轻量级的深度估计模型。如果你的机器人只需要做一件感知任务 - 比如一台只做导航避障的清扫机器人 - Orin Nano 绑绑有余。价格也最友好,开发者套件几百美元就能入手。
Orin NX 是大部分机器人项目的主力选择。70-100 TOPS 意味着你可以同时跑视觉 SLAM 和目标检测,或者一个检测模型加一个深度估计模型。16 GB 内存版本能加载更大的模型。多数商用移动机器人 - 送餐机器人、仓储 AGV、巡检机器人 - 用的是 Orin NX 这个档次。

AGX Orin 是当你发现 Orin NX 不够用时的升级路径。275 TOPS 加上 64 GB 内存,可以同时跑 3-4 个感知模型外加导航和规划的全套算法。人形机器人、复杂操作场景(比如需要同时做物体检测、位姿估计、场景分割的拣货机器人)通常需要这个级别。
AGX Thor 是 2025 年发布的新一代旗舰,基于 Blackwell GPU 架构,AI 算力跳到了约 2000 TOPS(FP4 精度)。这是 AGX Orin 的 7 倍多。它瞄准的是需要在机器人本地跑 Foundation Model 的场景 - 比如 VLA(Vision-Language-Action)模型做端到端的感知-决策-动作。128 GB 内存意味着可以加载相当大的模型。不过 40-130W 的功耗范围也说明,它更适合有稳定供电的场景(比如人形机器人有较大的电池),而不是小型移动机器人。
怎么选?
一个实用的决策框架:
- 列出你需要同时跑的所有算法 - 感知有几个模型?导航用什么方案?有没有 LLM/VLA 的需求?
- 估算总算力需求 - 每个模型在 TensorRT 优化后需要多少 TOPS 才能达到目标帧率
- 加 30-50% 余量 - 实际部署总是比预估多吃资源,你还需要留空间给 ROS 2 节点、系统开销、日志记录
- 检查内存 - 所有模型同时加载到显存里,够不够?这一条经常被忽略,然后部署时才发现 OOM(Out of Memory)
大部分团队的路径是:先用 Orin NX 开发和验证,确认算力不够再升级到 AGX Orin。 因为 Jetson 全系列跑同一套软件栈(JetPack SDK),迁移成本很低 - 代码基本不用改,重新编译一下就行。
TOPS 到底是什么意思
TOPS = Tera Operations Per Second,每秒万亿次运算。它是衡量 AI 推理算力的常用单位。
但这个数字需要带着精度标注一起看。同样写“100 TOPS”,在 INT8(8位整数)精度下和在 FP16(16位浮点)精度下意味着完全不同的东西。INT8 运算更简单,单位时间能做更多次 - 所以 INT8 TOPS 数字通常是 FP16 的两倍。AGX Thor 标称的 2000 TOPS 是 FP4 精度的数字,换算到 FP8 大约是 1035 TOPS。
对开发者来说,TOPS 是一个粗略的比较尺度,不是精确的性能指标。 实际推理速度取决于很多因素:模型架构(CNN 和 Transformer 对硬件的利用率不同)、batch size、内存带宽是否成为瓶颈、TensorRT 优化的程度。
一个更实用的衡量方式是直接跑 benchmark:用 TensorRT 把你的模型优化后,在目标硬件上实测推理延迟和吞吐量。NVIDIA 提供了 trtexec 工具专门干这件事。不要只看 TOPS 选型,一定要跑实测。 我见过有团队根据 TOPS 数字选了 Orin Nano,结果发现他们的模型因为内存带宽瓶颈根本跑不到理论峰值的一半。
GPU 在机器人上干什么
如果你的 AI 背景来自训练模型 - 在 A100 上跑几天训一个大模型 - 那你对 GPU 的认知可能需要调整一下。机器人上的 GPU 不是用来训练的,是用来推理的。
训练是“给几百万张图片,花几天时间学会识别物体”。这需要巨大的算力和内存,通常在数据中心的 A100/H100 上完成。
推理是“给一张图片,在 30 毫秒内告诉我图里有什么”。这需要的算力小得多,但对延迟的要求极其严格。机器人的感知系统每一帧都需要推理 - 如果相机 30fps,那推理延迟必须小于 33 毫秒才能不掉帧。
Jetson 上的 GPU 被优化来高效地做推理。核心工具链是 TensorRT - NVIDIA 的推理优化引擎。它拿到你的 PyTorch/ONNX 模型,做一系列优化:层融合(把多个小操作合并成一个大操作减少内存读写)、精度降低(从 FP32 降到 FP16 或 INT8,牺牲微小的精度换取 2-4 倍的速度提升)、针对具体 GPU 架构的 kernel 优化。
一个典型的例子:一个 YOLOv8-S 模型在 PyTorch 里用 FP32 在 Orin NX 上跑,推理一张图大约 30-40 毫秒。经过 TensorRT 优化到 FP16,降到 10-15 毫秒。进一步量化到 INT8,可以到 5-8 毫秒。同一块硬件、同一个模型,优化前后差 4-5 倍。 这就是为什么“会不会用 TensorRT”往往比“买哪个档次的 Jetson”更重要。
除了跑感知模型,GPU 在机器人上还干这些事:
- 点云处理:CUDA 加速的点云滤波、配准、分割
- SLAM 前端:特征提取和匹配可以放到 GPU 上加速
- 路径规划中的碰撞检测:大量的几何计算很适合 GPU 并行
NVIDIA 的 Isaac ROS 包就是干这个的 - 把 ROS 2 常用的感知和导航算法用 CUDA 重写了一遍,专为 Jetson 优化。比如 Isaac ROS Visual SLAM、Isaac ROS Object Detection,它们提供和标准 ROS 2 节点一样的接口,但底层用 GPU 加速,性能提升明显。
边缘计算 vs 云计算
“计算”可以发生在两个地方:机器人自身携带的计算平台(边缘端),或者远程的云服务器。怎么分配?
关键原则:延迟敏感的决策必须在边缘端完成。
什么是延迟敏感的?所有和“不撞东西”、“不掉东西”、“不伤人”相关的决策。具体来说:
- 避障和导航:必须在边缘。以 1 m/s 移动为例,如果把传感器数据发到云端、云端处理、发回指令,即使网络延迟只有 100 毫秒,机器人已经又走了 10 厘米。如果是 WiFi 偶尔抖动到 500 毫秒 - 你的机器人已经撞上去了。
- 实时感知:必须在边缘。相机每秒产生 30 帧图像,每帧几百 KB 到几 MB。把这些数据全部上传到云端不现实,带宽扛不住,延迟也太高。
- 运动控制:必须在边缘。关节伺服控制的频率通常在 100Hz-1000Hz,也就是每 1-10 毫秒就需要计算一次控制信号。网络延迟在这个尺度下完全不可接受。
什么可以放到云端?
- 高层任务规划:比如“接下来去哪个货架拣货”这种决策,偶尔延迟几百毫秒甚至几秒也没关系
- 大模型推理:如果你要用 LLM 做自然语言交互或复杂推理,本地 Jetson 可能跑不动太大的模型,可以发到云端。(AGX Thor 的出现正在改变这个局面 - 128GB 内存可以在本地加载不少大模型)
- 数据回传和分析:运行日志、传感器录像发回云端做离线分析和模型改进
- 地图更新和共享:多台机器人可以把各自建的地图上传到云端合并,然后下发给其他机器人
实际架构通常是**“边缘为主、云端为辅”**:所有实时链路(感知 → 决策 → 控制)在本地闭环,非实时的任务调度和数据分析走云端。两者之间通过 API 或消息队列通信。
一个真实的踩坑场景
有团队做过这样的架构:把物体检测模型放在云端的 GPU 服务器上,机器人本地只做基础的避障。理由是“云端 GPU 更强,检测精度更高”。
在实验室里一切正常 - WiFi 网络稳定,延迟 50 毫秒以内,检测结果回来得很快。
部署到客户的仓库后,问题来了。仓库的 WiFi 信号被金属货架严重干扰,延迟从 50 毫秒跳到了 2-3 秒,偶尔还会断连。结果就是:机器人“看”到一个物体时,它实际上已经路过了那个物体 2 秒前的位置。更糟糕的是,断连期间机器人完全“瞎了” - 本地没有检测能力,只能急停等网络恢复。
最后的解决方案:在 Orin NX 上部署一个轻量级的检测模型做本地实时检测(保证“不瞎”),云端的高精度模型只用于非实时的精细识别(比如读商品条形码)。永远不要让机器人的安全依赖于网络连接。
JetPack 和软件生态
硬件只是一半,跑在上面的软件栈同样重要。
所有 Jetson 都运行 JetPack SDK - 这是 NVIDIA 为 Jetson 定制的完整软件包,基于 Ubuntu Linux。它包含:
- L4T(Linux for Tegra):定制的 Linux 系统,包含针对 Jetson 硬件的内核驱动
- CUDA:GPU 通用计算框架,你训练模型时用的那个 CUDA,在 Jetson 上也是它
- TensorRT:推理优化引擎,上面详细讲过了
- cuDNN:深度学习加速库
- VPI(Vision Programming Interface):GPU 加速的计算机视觉基础操作 - 缩放、滤波、特征检测等
- Multimedia API:硬件编解码器接口,处理视频流用
如果你之前在 x86 的 NVIDIA GPU 上开发过,Jetson 上的体验出奇地相似。CUDA 代码基本不用改(注意 Jetson 用的是 ARM 架构,少数依赖 x86 特有指令集的库需要替换),PyTorch 有 Jetson 专用的构建版本,TensorRT 的 API 完全一致。主要区别就是算力更有限,需要更在意优化。
对开发者日常影响最大的一个细节:JetPack 的版本和 ROS 2 的版本绑定关系。 JetPack 5.x 基于 Ubuntu 20.04,对应 ROS 2 Foxy/Humble;JetPack 6.x 基于 Ubuntu 22.04,对应 ROS 2 Humble/Iron/Jazzy。如果你用的 ROS 2 包需要特定版本的 Ubuntu,而那个版本的 JetPack 还没发布 - 恭喜你,你即将进入“Docker 容器套娃”的快乐世界。这也是为什么 Docker 在机器人开发中几乎是标配,后面 DevOps 那一章会详细讲。
开发者日常在调什么
计算平台层面的工程工作,主要集中在几个方面:
功耗模式切换。 Jetson 支持多种功耗模式 - 比如 AGX Orin 可以在 15W、30W、50W 和 MAXN(不限功耗追求最大性能)之间切换。开发阶段通常用 MAXN 方便调试,部署时根据电池续航需求降到合适的档位。用 nvpmodel 命令切换,用 jetson_stats(社区开发的 jtop 工具)实时监控 CPU/GPU 频率、温度、功耗。
模型优化。 把训练好的模型转换成 TensorRT 引擎,调整精度(FP16/INT8),profiling 找瓶颈。这是在 Jetson 上跑 AI 最花时间的环节。INT8 量化需要一个校准数据集(calibration dataset),如果校准数据和实际部署数据分布差太远,量化后精度会明显下降。
散热管理。 Jetson 在持续高负载下会热节流(thermal throttling) - GPU/CPU 自动降频来控制温度。在封闭机器人外壳内,散热条件比开放的开发者套件差很多。有团队在实验室跑得好好的算法,装到机器人里跑半小时后帧率从 30fps 降到 15fps - 就是因为热节流了。解决方案通常是加散热片、导热垫、甚至小风扇,或者优化算法降低持续负载。
多进程资源分配。 一台机器人上同时跑十几个 ROS 2 节点:相机驱动、点云处理、目标检测、SLAM、导航规划、控制器、行为树... 它们都在争 CPU 和 GPU 资源。谁优先?用 Linux 的 nice 和 cgroup 做 CPU 调度,用 CUDA MPS(Multi-Process Service)让多个进程共享 GPU。这块没有银弹,基本就是实测、调参、再实测。
计算平台是机器人软硬件栈的交汇点 - 它的能力上限决定了你的算法能跑多复杂,它的功耗下限决定了你的机器人能跑多久。选对硬件很重要,但更重要的是把软件优化到配得上这块硬件。很多时候,一个经过精心优化的模型在 Orin NX 上跑出的效果,比一个没怎么优化的模型在 AGX Orin 上跑的还好。