Part 4: Algorithms · The robot's brain
Chapter 11
MoveIt 2 - 机器人手臂的“大脑”
你站在冰箱前面,想拿最高层架子上的一个杯子。你的手从身体侧面出发,绕过半开的冰箱门,避开旁边的调料瓶,最后精确地握住杯子的把手。整个过程大概两秒,你甚至没怎么想。
但你的身体其实做了一件非常复杂的事:肩关节、肘关节、腕关节同时在多个方向上旋转,彼此配合,让你的手沿着一条不碰任何东西的路径到达目标。你的大脑在实时计算关节角度、避免碰到冰箱门和调料瓶、同时保持手的朝向适合抓握。
这就是机器人手臂面对的核心问题:怎么让末端执行器(比如夹爪)从当前位置移动到目标位置,同时不撞到自己也不撞到环境中的任何东西。 Nav2 解决了底盘在平面上的导航,MoveIt 2 解决的是手臂在三维空间中的运动规划。如果说 Nav2 是机器人的“高德地图”,MoveIt 2 就是手臂的“大脑” - 它告诉每个关节该转多少度、什么时候转、按什么顺序转。
两种描述手臂状态的语言
在聊运动规划之前,有一个基础概念必须先搞清楚,因为后面所有东西都建立在它之上。
描述一台机械臂“在哪”有两种完全不同的方式。
关节空间(Joint Space) 用每个关节的角度来描述手臂状态。一个 6 自由度的机械臂有 6 个关节,每个关节一个角度值,所以它的状态就是一个 6 维向量:[q1, q2, q3, q4, q5, q6]。比如 [0, -45, 90, 0, 45, 0] 度 - 每个数字对应一个关节转了多少。这是对电机最友好的表达方式,因为你可以直接把这些角度值发给各个关节的伺服驱动器。
笛卡尔空间(Cartesian Space / Task Space) 用末端执行器在三维世界中的位置和朝向来描述。一个完整的末端姿态需要 6 个值:三个平移 [x, y, z] 加三个旋转 [roll, pitch, yaw]。比如“夹爪在桌面上方 30 厘米处,开口朝下” - 这是对人类最直观的表达方式。
这两种描述之间的转换,就是运动学要解决的事情。
正运动学和逆运动学 - FK 和 IK
正运动学(Forward Kinematics, FK) 的问题是:已知每个关节的角度,手臂末端在哪?
这是一个纯数学问题,而且有唯一解。你把每个连杆的长度和关节角度代入一系列变换矩阵相乘,就能算出末端的位置和朝向。虽然矩阵乘法看起来吓人,但对计算机来说不过是几次矩阵运算,微秒级就能出结果。
逆运动学(Inverse Kinematics, IK) 是反过来的问题:我希望夹爪到达空间中的某个位置和朝向,每个关节应该转多少度?
这个问题难得多。难在三个地方:
第一,可能无解。目标位置也许超出了手臂的工作范围 - 比如你让一台臂展 50 厘米的手臂去够 1 米外的物体,物理上就不可能。或者目标位置在工作范围内,但要求的朝向做不到 - 比如要求夹爪在某个位置朝上,但关节的旋转极限不允许。
第二,可能有多个解。这才是更常见的麻烦。想象你要碰自己的后脑勺 - 你可以从头顶绕过去,也可以从耳朵旁边绕过去,两种姿势都能到。对 6 自由度手臂来说,一个目标位置可能有 8 组甚至更多的关节角度组合都能到达。选哪一组?离当前姿态最近的?关节运动量最小的?避开障碍物的?这是一个需要策略的选择。
第三,数值稳定性。实际工程中大多数 IK 求解器用的是数值迭代方法(不是解析解),所以存在收敛速度和精度的 trade-off。MoveIt 2 默认使用的 IK 求解器是 KDL(来自 Orocos 项目),但很多团队会换成 TRAC-IK - 它结合了数值法和一个基于 SQP 的优化方法,在处理关节极限约束时表现明显更好,失败率比 KDL 低很多。
运动规划 - 在高维迷宫里找路
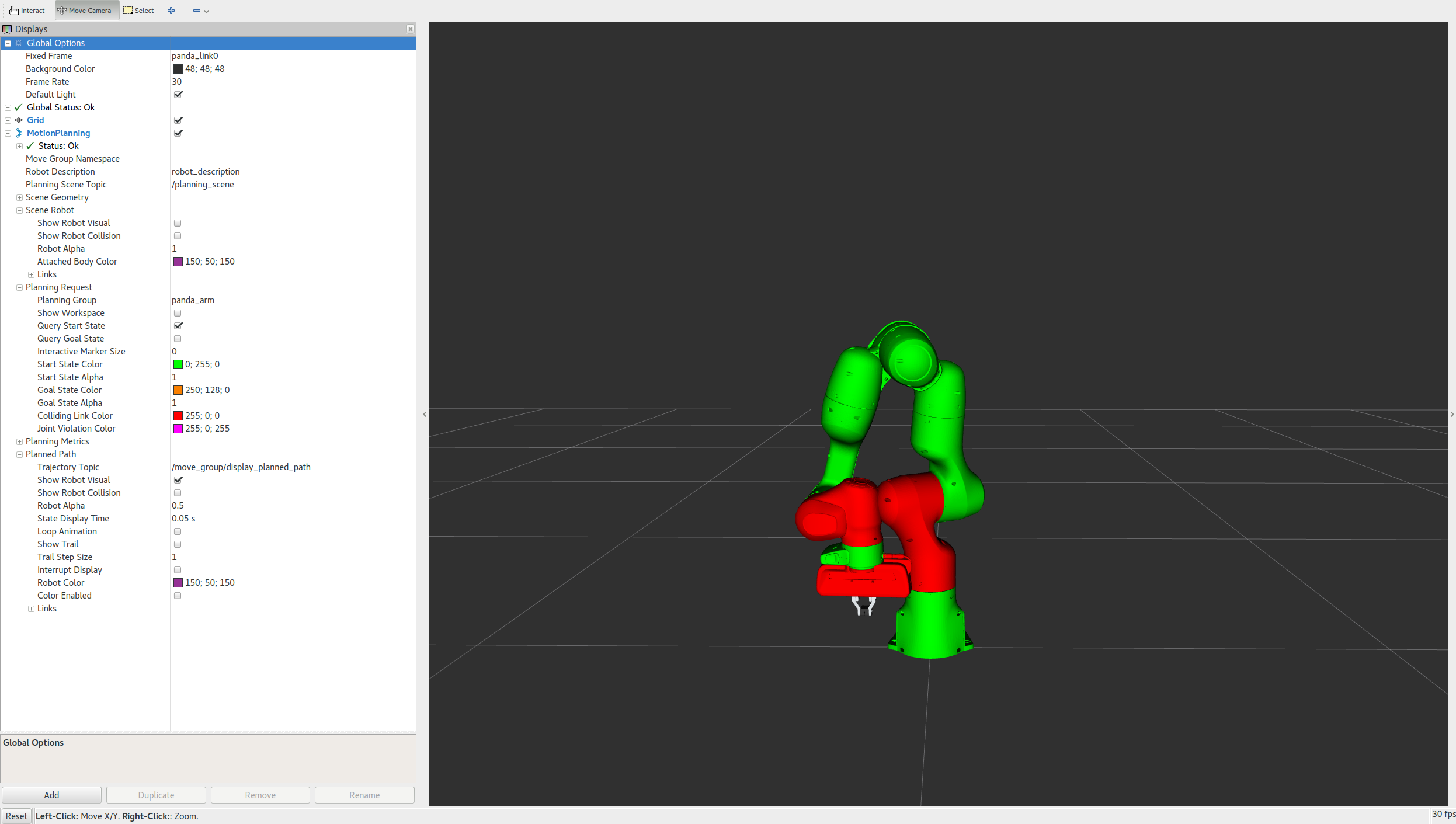
知道起点(当前关节角度)和终点(IK 算出的目标关节角度)还不够。手臂不能“瞬间跳”到目标姿态 - 它需要沿着一条路径连续地移动过去。而这条路径上的每一个中间姿态,都不能让手臂撞到任何东西。
这就是运动规划(Motion Planning)要做的事。
配置空间(C-Space)
理解运动规划的关键概念是 配置空间(Configuration Space, C-Space)。
一个 6 自由度手臂的配置空间是一个 6 维空间,每个维度对应一个关节的角度范围。手臂的每一个可能的姿态对应这个 6 维空间中的一个点。现在,把真实世界中的障碍物“投影”到这个空间里 - 所有会导致手臂碰撞的关节角度组合变成 C-Space 中的“禁区”。
运动规划的本质就变成了:在一个 6 维空间里,从一个点走到另一个点,绕过所有禁区。
问题在于,这个空间维度太高了。你没法像 Nav2 那样画一张 2D 地图然后跑 A* 搜索。6 维空间要离散化成网格的话,计算量随维度指数爆炸。所以机器人手臂的运动规划用的是一种完全不同的策略:基于采样的规划(Sampling-based Planning)。
OMPL 和它的算法家族
MoveIt 2 的默认运动规划后端是 OMPL(Open Motion Planning Library) - 一个开源的运动规划算法库,里面实现了几十种采样式规划算法。
先给一个实用建议:绝大多数场景用 RRT-Connect 就够了。 它是 MoveIt 2 的默认规划器,从起点和终点同时长两棵随机树,中间碰头就找到路径了。速度快,开箱即用,不需要你理解太多理论。如果你刚开始接触 MoveIt 2,不用纠结算法选择 - 用默认的就行。
那什么时候需要换?两个典型信号:
路径质量不够好时,考虑 RRT*。RRT-Connect 找到的路径是”能用”的,但往往弯弯绕绕,因为它是随机探索出来的。如果你的场景对路径平滑度有要求 - 比如手臂端着一杯水,抖一下就洒了 - RRT* 会在找到初始路径后持续优化,重新连线让路径更短更光滑。代价是更慢:你通常要给它一个时间预算(比如 5 秒),让它在这段时间内尽量优化。适合离线规划或对实时性要求不高的任务。
狭窄通道问题严重时,考虑 PRM 或 KPIECE。手臂要伸进两个货架之间拿东西,可行路径在 C-Space 中只是一条很窄的”缝隙”,RRT-Connect 的随机采样可能怎么撒都撒不到那条缝里。PRM 换了一种思路:先在整个 C-Space 中大量撒点,把不碰撞的点留下来互相连线形成一个”路网”。路网建好之后,不管你查询什么起终点,直接在路网上搜就行。如果环境是静态的(工厂产线上固定的工位),PRM 特别划算 - 建一次路网反复用。但环境动态变化时(有人在手臂旁走来走去),路网要不断重建,优势就没了。
核心判断逻辑很简单:默认 RRT-Connect;路径太丑换 RRT*;狭窄空间频繁超时换 PRM 或 KPIECE;环境静态且需要反复规划时 PRM 最划算。
碰撞检测 - 规划器的计算瓶颈
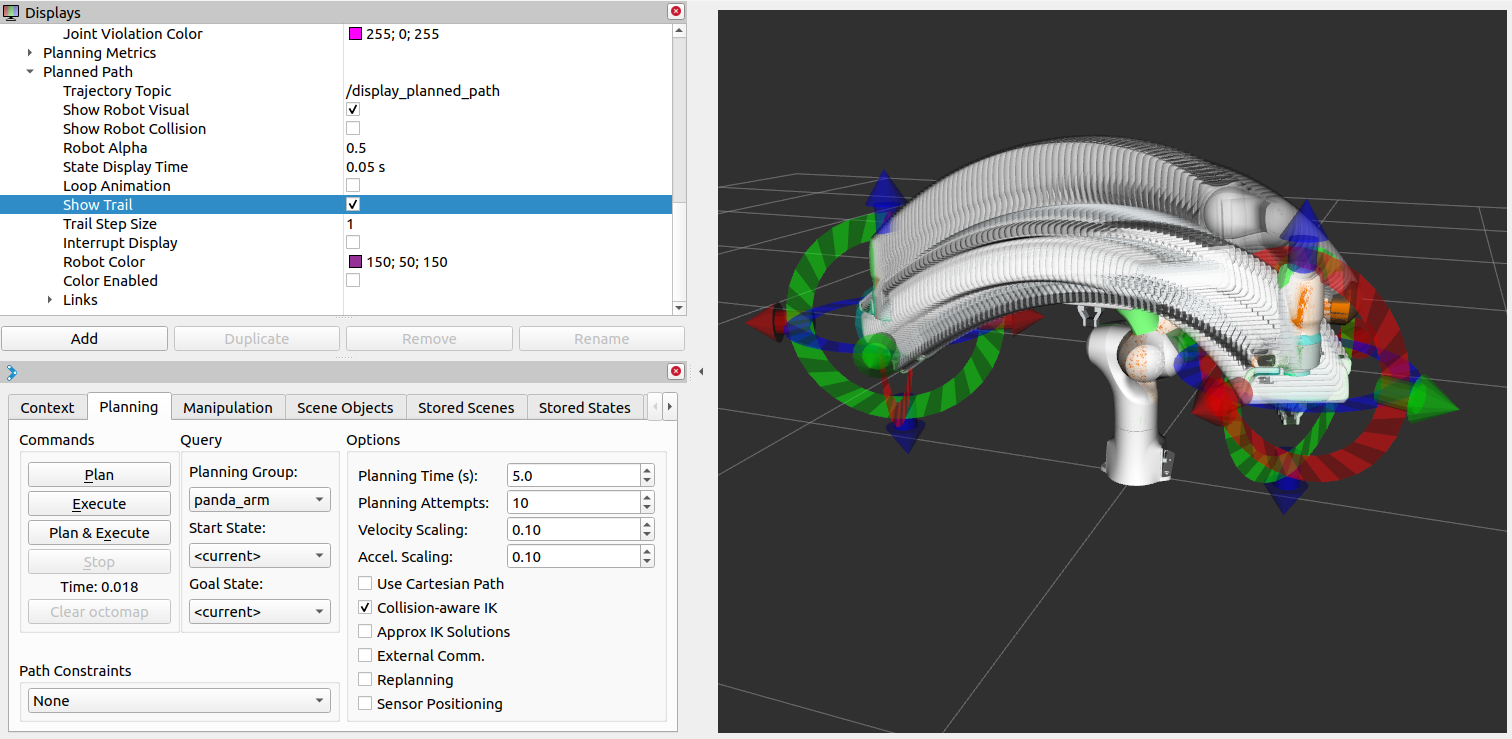
运动规划里每撒一个采样点、每延伸一步,都要回答一个问题:这个姿态会碰撞吗?一次规划可能采样几千上万个点,每个点都要做碰撞检测。所以碰撞检测的速度直接决定了规划的速度。
碰撞检测配错了是什么后果?一个真实场景:你的机械臂在桌上抓取物体,Planning Scene 里忘了添加桌面的碰撞模型。规划器找到一条”完美”的路径 - 穿过桌面。在仿真里看起来手臂像幽灵一样穿桌而过,在真实硬件上就是手臂全速撞向桌面。反过来,如果碰撞模型过度膨胀 - 比如把桌面建成了一个比实际大 10 厘米的盒子 - 规划器会认为桌面附近全是禁区,怎么都找不到抓取路径,反复报 PLANNING_FAILED。碰撞检测的核心挑战就是在”漏检导致撞击”和”误检导致无路可走”之间找平衡。
碰撞分两类,处理方式不同:
自碰撞(Self-collision) - 手臂的某个连杆打到了自己的其他部分,或者打到了机器人的躯干。MoveIt 2 用 ACM(Allowed Collision Matrix) 来加速:这个矩阵记录了哪些连杆对之间”永远不可能碰到”或者”碰了也没关系”(比如两个相邻连杆的连接处),检测时直接跳过这些对。ACM 配置不当的坑很隐蔽 - 如果你给机器人换了一个更大的夹爪但没更新 ACM,MoveIt 2 可能还在用旧的”这两个部件碰不到”假设,结果新夹爪在某些姿态下撞到了前臂。MoveIt 2 的 Setup Assistant 可以自动生成初始 ACM,但换了末端工具后一定要重新检查。
环境碰撞 - 手臂碰到了外部障碍物。你需要告诉 MoveIt 2 环境里有什么东西,通过 Planning Scene 这个数据结构来管理。两种常见做法:对于已知的固定物体(桌面、墙壁、机器人底座),手动添加基本几何体(盒子、圆柱)到 Planning Scene 里,简单可靠;对于动态或形状复杂的环境,接入深度相机的点云数据,用 OctoMap(八叉树结构的 3D 占据地图)自动构建环境模型。底层的几何碰撞计算由 FCL(Flexible Collision Library) 完成。
关键的工程权衡在碰撞模型的精细程度上。用手臂的精确 mesh 模型做碰撞检测很准确,但一次规划要检查上万个采样点,每个点都做精确 mesh 碰撞,规划时间可能从 1 秒变成 10 秒。实际项目中常见的做法是:手臂本体用胶囊体(capsule)近似 - 速度快得多,代价是稍微”过度保守”,会把一些实际能过的缝隙判定为碰撞。如果发现规划器在明显有空间的地方找不到路,检查碰撞模型是不是膨胀过度了。
抓取规划 - 从“到那里”到“拿起来”
运动规划解决了“手臂怎么到达目标位置”,但到了还不够 - 你还得把东西拿起来。
抓取规划要回答两个问题:从哪个方向接近物体?夹多紧?
抓取姿态(Grasp Pose) 的选择取决于物体的形状和任务需求。拿一个水杯,你可能从侧面水平接近握住杯身;拿一支笔,你可能从上方垂直捏住。每个物体可能有几十种合理的抓取姿态。MoveIt 2 本身不做智能的抓取姿态生成 - 这通常由上游的感知模块(比如基于 GPD 或 GraspNet 的抓取检测网络)提供一组候选姿态,MoveIt 2 负责选一个能规划出可行路径的。
位控和力控的切换是抓取中一个关键的工程细节。接近物体的过程用 位置控制(Position Control) - 你需要手臂精确地到达指定位置。但真正抓握的瞬间要切换到 力控制(Force Control) - 你不再关心位置精确到毫米,而是关心施加的力是否合适。抓鸡蛋用 2 牛顿,抓铁块用 20 牛顿,抓错了就是碎鸡蛋或者掉铁块。
很多工业场景不需要这么灵活。如果你永远只抓同一种规格的盒子,硬编码一个固定的抓取姿态和夹持力就行了 - 简单、可靠、好调试。灵活的抓取规划是在面对不确定物体时才真正需要的能力。
开发者踩坑指南
奇异点(Singularity)
这是机械臂开发者最头疼的问题之一。奇异点是手臂在某些特定姿态下,末端执行器“丢失”一个或多个自由度的现象。
最常见的例子:手臂完全伸直时。这时候你让它沿着伸直方向再往前走一点点,关节需要的角速度趋近于无穷大 - 实际表现就是手臂突然剧烈抖动或者直接报错停下来。类比:你把手臂伸直指向前方,然后试着让指尖再往前移动 1 厘米但手肘不能弯 - 你做不到,因为伸直方向上的运动自由度没了。
MoveIt 2 在规划时会检测奇异点并尝试绕过,但在笛卡尔空间的直线运动中(computeCartesianPath),如果路径恰好穿过奇异点,规划会失败。解决方法通常是调整路径的 waypoints,绕开奇异区域。
规划超时
OMPL 是基于采样的,不保证一定能找到路径。在狭窄空间里(比如手臂要伸进两个货架之间拿东西),可行路径本身就是 C-Space 中一条很窄的“通道”,随机采样碰到这条通道的概率很低。
实际表现:你给 MoveIt 2 一个目标,等了 5 秒(默认超时),回来一个“PLANNING_FAILED”。
常见的应对策略:增加规划时间(但客户可能不接受等 30 秒);换更高效的规划器(比如在狭窄空间用 BiTRRT 或者 KPIECE);简化碰撞模型让采样成功率提高;或者把一次困难的规划拆成多段简单的。
IK 多解的选择
前面说了 IK 可能有多组解。如果你不指定偏好,MoveIt 2 会选一个“最近”的解 - 离当前关节角度最近。但“最近”不一定“最好”。有时候“最近”的解会让手臂从桌子底下绕过去,而一个“更远”的解反而是从上方简单地挥过去。
一个常见的做法是给 IK 求解器提供多个 seed(起始猜测值),得到多组解,然后用运动规划器分别对这些解做规划,选一个规划耗时最短或路径最光滑的。这增加了一些计算量,但能避免很多诡异的运动轨迹。
夹爪打滑
力控参数没调好是最常见的原因。但还有一些不那么明显的坑:夹爪的接触面材质(光滑的金属夹头抓光滑的瓶子 - 物理上就抓不住)、物体的重心偏移(抓一个装了半瓶水的瓶子,重心位置随水的晃动在变)、抓取点的选择(抓瓶身 vs 抓瓶盖,受力方式完全不同)。
这些问题往往不在软件层面解决,而是要回到硬件 - 换有摩擦力纹理的夹爪指尖垫,或者用吸盘代替夹爪。在机器人开发中,“问题不在你的代码里”这种情况比软件开发中常见得多。
MoveIt 2 的输出喂给了谁
MoveIt 2 的最终输出是一条 关节轨迹(JointTrajectory) - 一系列带时间戳的关节角度序列。这条轨迹通过 ROS 2 的 FollowJointTrajectory action 接口发送给手臂的关节控制器,控制器负责让真实的电机按照这条轨迹运动。
在整个系统中,MoveIt 2 的上游是感知模块(告诉它“要去哪”和“环境里有什么障碍物”),下游是关节控制器(执行它规划出的轨迹)。而编排这一切 - 什么时候做感知、什么时候规划、什么时候抓取 - 是行为树的工作,也就是下一个话题之后会聊到的内容。